با توجه به اینکه انرژی ابزار درونچاهی MWD (نصبشده بر روی لوله حفاری) توسط تجهیزات سطحی تأمین نمیشود، این انرژی باید در درون چاه تولید شود. دو نوع منبع تغذیه در ابزار درونچاهی MWD عبارتاند از: ۱- باتریهای لیتیومی (با ظرفیت ۸۰۰ آمپرساعت) و ۲- توربینهای ژنراتور. در ابزار درونچاهی MWD که مجهز به سیستم پالس منفی هستند انرژی کمتری مورد نیاز است و از باتری بهعنوان منبع تغذیه استفاده میشود درحالیکه در سیستمهای پالسساز مثبت و فرکانسی که انرژی بیشتری مصرف میکنند، از توربینهای ژنراتور بهعنوان منبع تغذیه استفاده میشود. از طرف دیگر، در سیستمهایی که سنسورهای بیشتری نصب شدهاند و حجم بیشتری از اطلاعات ارسال میشود، انرژی بیشتری مورد نیاز است و حتی در سیستمهای پالس منفی نیز بهجای استفاده از باتری، از توربین ژنراتور استفاده میشود. همچنین در سازندهای با دمای بالا که استفاده از باتری امکانپذیر نیست، توربینها از اولویت برخوردارند. گرچه توربینها مزایای بیشتری نسبت به باتریها دارند، اما بیشتر در معرض صدمات مکانیکی هستند. برای محافظت توربینها از کندههای حفاری که در گل حفاری معلق هستند و باعث بروز خسارت در پرههای آن میشوند، از صفحات فیلتر استفاده میگردد.
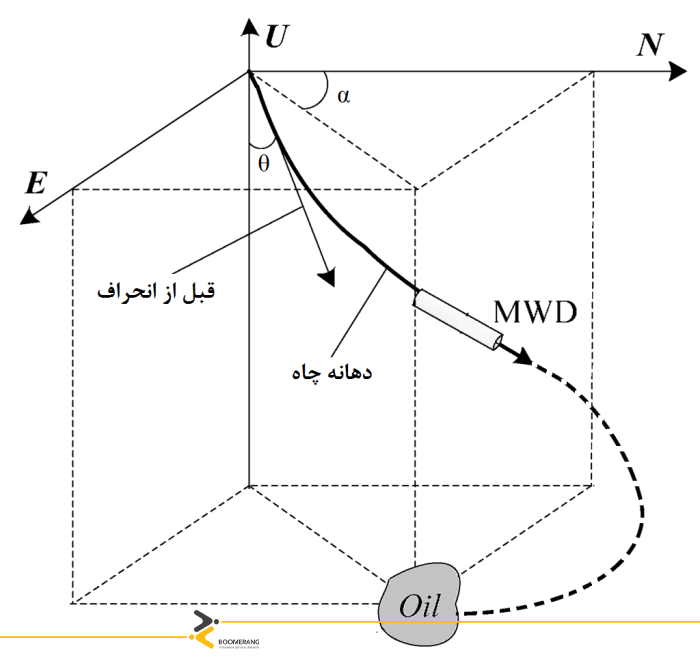
تقریباً در تمامی سیستمهای MWD از سنسورهای موقعیتیاب یکسانی برای محاسبه inclination، آزیموت و جهت BHA استفاده میشود. این سنسورها شامل سه جاذبهسنج (accelerometer) عمود بر یکدیگر و سه مغناطیسسنج (magnetometer) عمود بر هم میباشند. شکل (۳) شماتیکی از موقعیت سنسورهای فوق در ابزار درونچاهی MWD را نشان میدهد.

{kind=link}
{kind=link}